Insaniti: Beetleweight (3lb) BattleBot
Various materials, design structures, and electrical components are tested to the maximum as one robot attempts to disable the opposing robot in a strongly armored box. Generally, robots are fitted with motor-power weapons and wheels to win a battle of control, strategy, and durability. As my first structurally challenging project in college, I was tasked to work with my team - J. Peavey, T. Haveliwala, D. Li, G. Tunnicliffe - to construct a 3-lb BattleBot.
Initial Design
To begin, my team and I developed a strategy where we construct a weapon that theoretically disables the opposing robot after the first collision. Accordingly, we developed a vertical-disk with two hitting edges and a large moment of inertia. The specifications of the initial design are outlined in the presentation above.
Design Optimization
To optimize the kinetic energy imparted on the opposing robot, the weapon must have a high angular velocity but must have a minimal spin-up time to evade damage from the opposing robot. To model the motor's spin-up time based on the viscous friction coefficient and the kV value, I worked with V. Madabushi to develop this MATLAB code that calculates the weapon's angular velocity and kinetic energy at time t, assuming that the weapon starts at rest. Based on the data from our model, we identified the appropriate motor KV for our application to be 1100 kV.
Construction
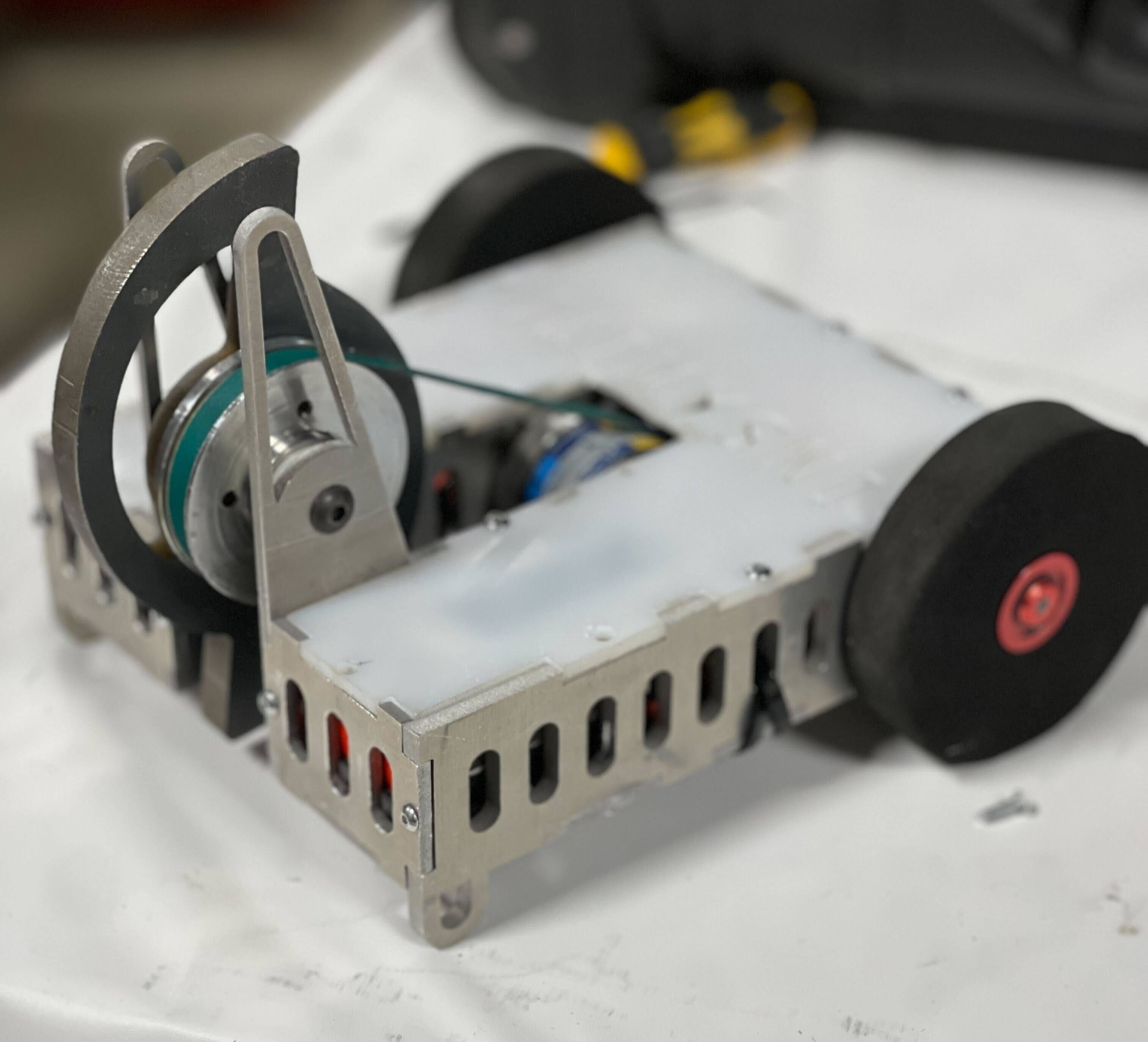
Using the RoboJacket's budget, we ordered the electrical components, necessary stock, and selected McMaster hardware to fabricate the robot. Simultaneously, RoboJackets senior members trained my team and I to use metal fabrication tools such as the manual mill, manual lathe, horizontal bandsaw, and electrical tools (e.g. soldering irons, heat guns, etc.). Once the raw materials arrived, we started machining the parts and assembling components. After 1.5 months, we were able to completely assemble our robot and spin-up our weapon. Upon turning on our robot, we realized the robot's center of mass is too far in front of the wheels, resulting in a high friction force between the floor and our robot's skids. Unfortunately, our robot already weighed 3-lbs, so we were not able to attach bearings effectively to the skids in time.
Competition
For our competition, several RoboJackets teams drove to Pennsylvania to compete in the BattleBots competition at Motorama. During our first two rounds, we encountered electrical issues: our button was stripped. We were unable to turn on the robot, so we were disqualified. The next day, we challenged one of the semifinalists to battle against us, so we were able to test our weapon. During the fight, I learned that the floor conditions were sub-optimal for our robot design and limited movement further, and I learned that clearance from the ground must be minimized. However, we were able to determine that our robot is durable since it remained unscathed.